Radar technology is being further developed in conjunction with artificial intelligence (AI)
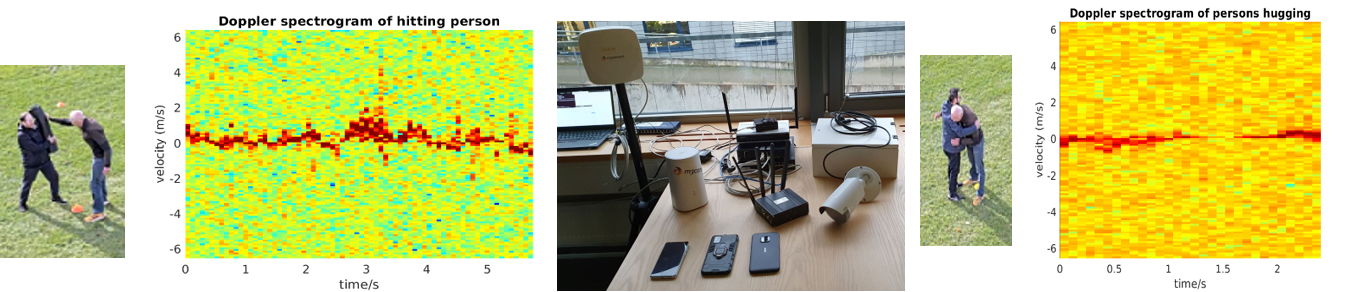
In KIRaPol.5G, the aim of radar measurement is not only to measure the distance, direction (angle) and speed of target objects, but also to determine the type or class of a target. Classification is made possible by the use of artificial intelligence (AI). This is most clearly illustrated by the AI-based recognition of objects and people in photos or videos. Neural networks (NN) are trained with a large amount of image and video data in order to then independently recognize the previously learned image and video classes by executing these NNe. With the "radar image", however, it is not photo pixels that make up the image, but speed points in a speed/time diagram. This means that the radar is used to measure speed components of a moving target and record them over time (e.g. a few seconds). This produces a characteristic image in which the different speed components are displayed in color.
The photo above shows a person walking and moving away from the radar sensor. They then turn and walk back towards the radar. The walking speed (velocity) of the person is measured in meters per second (m/s). If the person walks away from the radar, the walking speed is positive. If the person moves towards the radar, the velocity is negative. If the person turns around, they come to a brief standstill and the speed is zero.
A kind of sawtooth pattern can be seen across this speed profile of the red curve. These are also measured speeds, namely those of the movement of the arms and legs. When walking, these move evenly forwards and backwards, resulting in an oscillating movement at a certain speed, which can be measured as a so-called micro-Doppler.
Artificial intelligence (AI) is integrated into this project in the form of a neural network. This is a predefined structure that applies a series of operations to an input. These operations each use weights to control the processing. These weights are learned during training and are only learned during training. During subsequent use, processing is carried out using the weights learned during training.
"Teaching" the AI
For training, examples (here radar data) with known class assignments (here the labels derived from the camera data) are processed with the neural network. An adaptation of the system is determined from the deviation between the calculated and the known solution. The weights used in the individual operations are adjusted, and this procedure is repeated until weights are found with which the given structure provides the best possible prediction.
Inference
(This step is separate from the other operations described here.)
After training, the neural network can be used to make a prediction for new radar data. The same operations with the weights learned during training are applied to the new data. No storage of the radar data is necessary here. In addition, labels are no longer required. Since labels are no longer required, camera data is also no longer needed and a later system can only send the resulting alarm messages. In response, a separate camera can then be added for examination by a human, for example.